 Admiralty Research Laboratory - Passive Sonar
Admiralty Research Laboratory - Passive Sonar
Admiralty Research Laboratory - Passive Sonar
Admiralty Research Laboratory's Long-range Passive Sonar Processing for Submarines
Overview
Post-WWII ARL research into machinery noise sources, propeller cavitation and long-range passive sonar came together in the design and construction of a new class of conventional (Diesel-Electric powered) submarine: the PORPOISE class of the late 1950s known as P-Boats. Their propellers were specifically designed for reduced noise by delaying the onset of cavitation. Propeller cavitation, arising from high rotational speeds, is a particularly loud source of noise that is easily detected. Both main and ancillary machinery noise reduction together with quiet propellers resulted in their radiated noise when snorting being a staggering 3% of what was previously the norm. Further, they were virtually undetectable when submerged and running on electric-drive. They and the similar, slightly later OBERON class (known as O-Boats) were the quietest of all NATO submarines and substantially quieter than Soviet submarines.

Royal Navy OBERON Class Diesel-Electric submarine
Their quietness in operation made them ideal platforms for the ARL-designed long-range passive sonars, codenamed KNOUT and SOAP, which were Admiralty Patternised as Sonar Type 186 and Sonar Type 2007, respectively.
Thus passive sonar affording long-range detection by listening for the noise radiated by other vessels became a reality and the sonar of choice for all submarine operations other than the actual prosecution of a target. Further, passive sonar was ideally suited for the self-protection of the UK's nuclear deterrent carrying submarines whose need to remain undetected was of paramount importance to be viable; the principal factor in remaining undetected being to detect the opposition before being detected, and take evasive action.
KNOUT - Sonar Type 186
Initial work on submarine-borne long-range passive sonar was commenced in the mid-1950s under the codename KNOUT (an off-shoot of ARL Programme CORSAIR), and involved multi-hydrophone arrays (topside arrays) experimentally fitted to the casing of T-class submarines HMS/Ms TIRELESS and THULE. The first service version of this system was engineered by HMUDE, Portland as Sonar Type 186.
The signal processing of Type 186 produced a single fixed (unsteered) broadside beam that meant the submarine had to be manoeuvred to search a wider sector / area. This transpired to be a severe operational drawback. Consequently, by 1957, ARL was considering ways of including in a submarine the multi-look (over ~180 degrees) digital signal processing technique used at AES Unst (produced under the codename DICE) for the processing of Sonar 186 arrays. This was based on cross-correlating equipment known as DICE 1 that was used successfully at AES Unst in the key exercise NIGHTSHADE – the operational assessment of prosecuting land-based CORSAIR detections using aircraft. DICE 1, in many ways, out-performed the operational sonar Type 191, engineered by HMUDE under the CORSAIR programme and also trialled at AES Unst.
DICE - The Acoustics (Digital) Computer
Another off-shoot of the Admiralty Research Laboratory's programme CORSAIR was an investigation of the possibilities of using digital processing for the correlation of sonar signals from a pair of hydrophones. Angular resolution of the signals arriving at the hydrophones was by use of the wave-front and relative delays in the hydrophone's signal path, following one-bit (zero-crossing) digitisation of the band-pass filtered analogue signals.
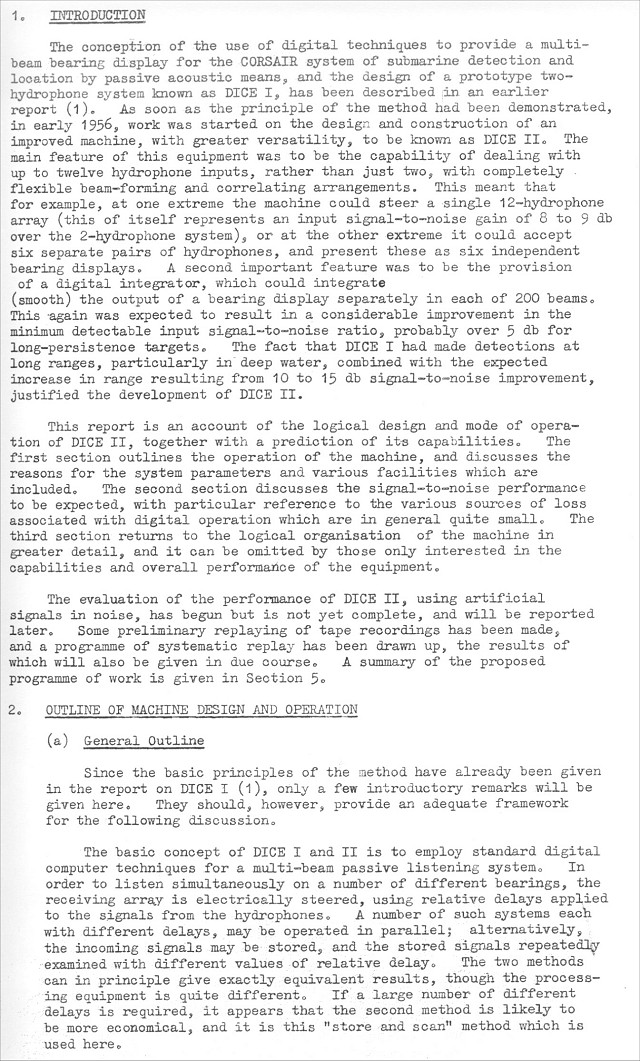
Controls and Storage portion of the DICE II processing cabinets -
Steve Sutton working on the main storage cabinet
SOAP - Sonar Type 2007
SOAP was based on innovative digital processing of the underwater sound received by Flank Arrays - hydrophones (underwater microphones) fitted along the sides of the submarine. The digital processing concept was proven under an ARL investigation into long-range (>100 miles) submarine detection systems with large hydrophone arrays sited on the seabed, connected to land-based processing and display in the Shetland Isles (codenamed CORSAIR), over the period 1952-7.

Production version of Sonar 2007 fitted in the Sound Room of HMS/M OTUS
Prototype versions of Sonar 2007, codenamed SOAP
Stage II were extremely successfully trialled in HM Submarines SEALION
(P-Boat) and OTUS (O-Boat) in 1965-6. The passive sonar, SOAP, was the
culmination of ARL’s research work started by the
Acoustics Group (D-Group) and continued by the Submarine
Detection Group
(L-Group) from 1959 to 1978. Also trialled, fitted to SEALION
in1966, was a version of SOAP with a Passive Ranging adjunct, SOAP Stage III;
this wasn't taken-up as the ranging function was handicapped by the limited
length of the flank arrays, which necessitated operation in the higher octave
band (1.6 to 3.2kHz) containing less target noise to be detected. Note SOAP
Stage I was a reduced capability (half the number of beams) laboratory only
prototype to prove the concept and was never fitted in a submarine.
This page is under construction
| ~ Main Page ~ | ~ Previous Page ~ | ~ Top of this Page ~ |